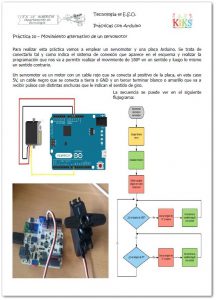
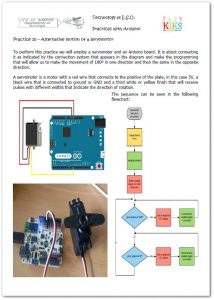
[:es]Práctica 10[:en]Practice 10[:] [:es] Práctica 10 – Movimiento alternativo de un servomotor [:en] Practice 10 – Alternative motion of a servomotor [:]